This project aimed to design a modular support structure for a Polytec vibrometer OFV-505 and an ORBBEC Femto Mega 3D camera. The system needed to be lightweight, robust, and compatible with both a UR10e robotic arm and a standard tripod.
The objectives are the following:
- Create a versatile support structure for lab and robotic applications.
- Generate technical drawings for manufacturing.
3D CAD Modeling
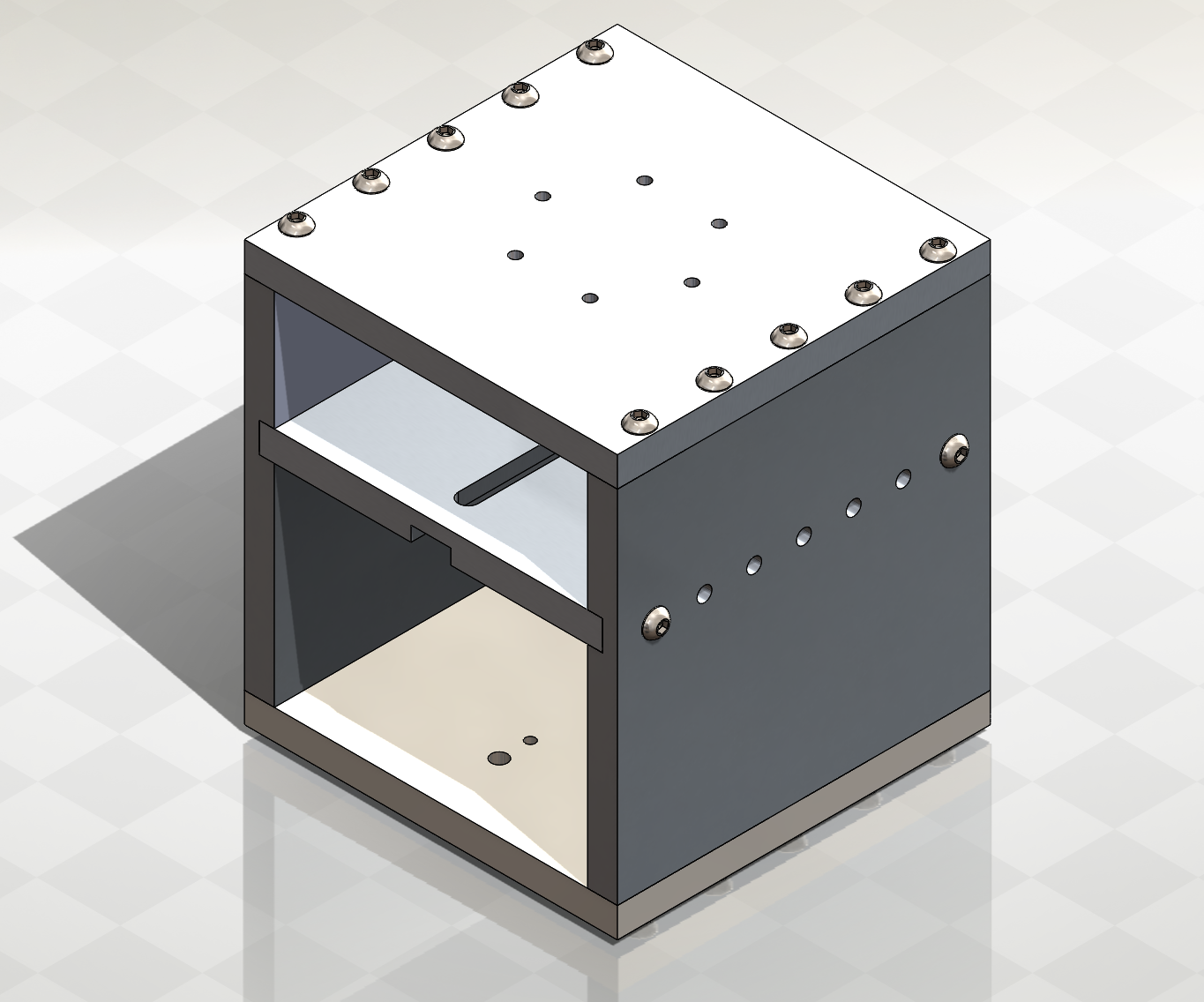
The system was modeled as an assembly with four main custom parts:
- Base Plate – tripod mounting interface.
- Top Plate – UR10e mounting adapter.
- Side Plates – enabling horizontal adjustment.
- Drawer – holding the ORBBEC camera securely.
Standard ISO 7380 M6 bolts were selected to simplify assembly and ensure compatibility.
Integration with Nordbo Robotics Sensor
Although the top plate includes an adapter for the UR10e robotic arm, the support structure was primarily designed to integrate with a Nordbo Robotics NRS-6200-D80 sensor. This configuration allows the vibrometer and camera assembly to benefit from the sensor’s advanced force-torque capabilities, enabling precise alignment and stable operation during robotic tasks.
As a result, the structure’s dimensions and mounting interfaces have been designed with the Nordbo sensor as the primary interface, rather than for direct UR10e mounting.
Technical Drawings
Once the 3D model was finalized, I created detailed 2D technical drawings for each part and the overall assembly using SOLIDWORKS.
The result is a set of manufacturing-ready drawings including:
- Assembly.pdf – Full assembly documentation.
- Detail Drawings.pdf – Detailed definition drawings for each part.
Appendices
The datasheets for external components are available here:
- Polytec – Vibrometer OFV-505.pdf
- Universal Robots – UR10e.pdf
- Nordbo Robotics – NRS-6200-D80.pdf
- Nordbo Robotics – NRS-6 User Manual.pdf